2019-02-02 AG-デスクトップレコーダで、4秒(数秒)しか録画できない(のが直った)件 [長年日記]
AG-デスクトップレコーダで、4秒(数秒)しか録画できない(のが直った)件
- 記載日
- 2019/02/02
- 1.背景
- ■AmuseGraphics のライセンスを購入したが、4秒(数秒)しか録画できず、困っていた
- ■そこで、作者の方に連絡を取って、アドバイスを頂くことにした
- 2.江端から作者様へ送付したメールの概要
- ■はじめまして。江端智一と申します。
- ■以前より、 AGDRec64.exeを愛用させて頂いております。
- ■この度、ライセンス切れであるとの表示が出たため、以前のファイルを全部抹消した上で、AG_140.zipをダウンロードしてインスートルした後、ライセンスキーも購入し、設定致しました。
- ■ところが、制限制約をしていないのに、どうしても4秒以上の録画ができず大変困っています。
-
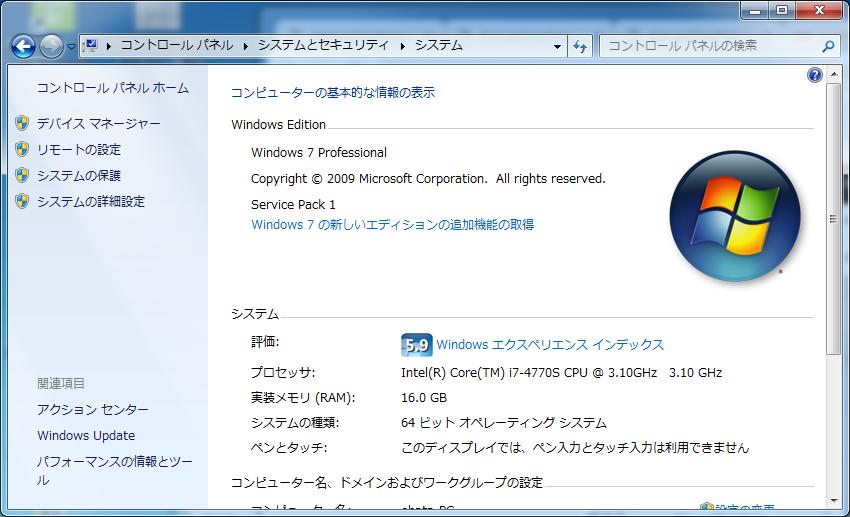
- ■当方のPCのスペックは以下の通りです
- ■何卒よろしくお願い申し上げます。
- 3.作者様から江端に頂いたメールの概要
- ■問題の把握
- 「録画開始から4秒後に自動的に録画が終了してしまう」という仮説にて、以下御説明致します。
- ■状況分析1
- ■添付されたmp4ファイルは、最後がおかしくなっている様に見えますが、とりあえず再生は出来ていますで、AG-デスクトップレコーダーとしては、正常に録画終了しているのかもしれません。
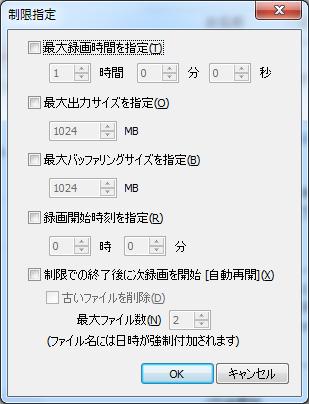
- ■そうなる理由としては、制限設定が誤って働いているか、録画制御キーか、Ver1.4.0で追加したプレビューダイアログで、録画終了が指示された、という可能性が考えられます。
- ■対応1 \AmuseGraphicsの削除
■AmuseGraphicsはドキュメントフォルダーにあるAmuseGraphicsというフォルダーに設定ファイルを保存しています。このため、古い設定が残っていて問題が出ている可能性も考えられますので、もしドキュメント\AmuseGraphicsを残されていた場合には、このフォルダーを削除してから、再度、AmuseGraphicsでレジストキーを登録してみて下さい。
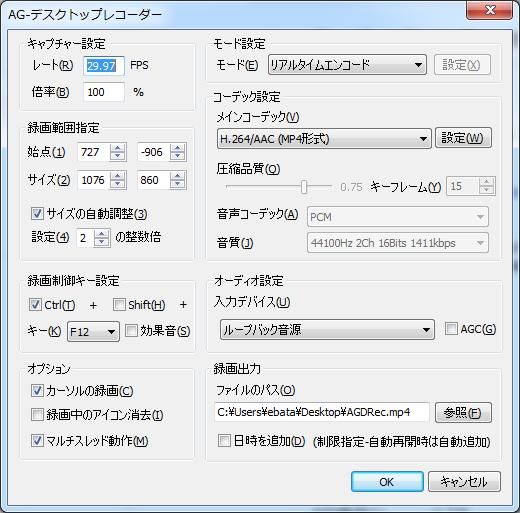
- ■対応2 録画制御キーの設定
■制限設定については、前述のAmuseGraphicsフォルダーの削除で、問題があった場合にも問題は無くなると思われます。制御キーについては、設定ダイアログの「録画制御キー設定」で、「F12」となっている所を「無効」に変更すれば、他ソフトやキーボードの異常動作により、録画制御キーが押された状態になっても録画が終了する事を防げます。
- ■対応3 録画ログによる確認
■プレビューダイアログについては、AGアイコンをクリックして表示し、「設定変更」から、「ピン止め」を選択し、再度AGアイコンをクリックし、表示させた状態で、このダイアログにある「録画開始」ボタンを押し、「録画開始」から「録画終了」に変わった後、勝手に「録画開始」に戻っているかどうかを確認すれば、何かしらの問題が発生しているかどうかのヒントは得られるかもしれません。
- ■対応4 H.246コーデックや録音デバイズの設定
■なお、H.246コーデックや録音デバイズ絡みの問題も想定されますので、上記の確認を行っても状態に変化がない場合には、コーデック設定を「AmuseGraphics Movie (AGM形式)」、オーディオ設定を「使用しない」に変更しても、やはり4秒しか録画できないかどうかを確認してみて下さい。
- ■問題の把握
- 4.江端から作者様へ送付したメールの概要(その2)
- ■サポート頂きありがとうございました。
- ■ご指導の内容を実施して、mp4の録画ができるようになりました。
- ■今後のユーザの皆様へのアドバイスにお役に立ちますよう、概要を記載させて頂きます。
- ■江端の実施事項概要
- ■(Step 1)¥AmuseGraphicsを削除した後、アンインストールを実施し、再度インストールを実施し、ライセンスキーを投入致しました。
- ■(Step 2)この後、mp4での録画を試みたのですが、4秒録画から改善は見られませんでした。ログを見たところ、8割がたのフレームがDropしていることが分かりました。
- ■(Step 3)そこで、御指示の通り、(a)F12の無効、(b)AGM形式にして、(c)オーディオ設定にしない、として、さらにプレビューは「ピン止め」としました。
- # 個人的な所感なのですが、この、「一回、AGM形式で録画してみる」が重要な感じがしています。
- ■(Step 4)AGM形式のファイルは、AmuseGraphics(x64)にドラッグすれば再生できることを確認しました。
- ■(Step 5)ここで再び、(a)F12の無効、(c)オーディオ設定にしない、を保持したまま、MP4形式としたのですが、FPSは"15"に落しました。
- ■(6)これによって、録画できるようになりました。ログの内容は以下の通りです
- **************************************************
- * AG-Desktop Recorder (Realtime MP4 Encode Mode) *
- **************************************************
- - Setup Info -
- Multi Thread : Yes
- Capture Size : 1280 x 1024
- Output Size : 1280 x 1024
- Req Frame Rate : 15.00 FPS
- Video Profile : Baseline
- Video Quality : 90
- HW Encode : Disable
- Audio Capture : No
- - Capture Info -
- Capture Time : 36.2 Sec
- Capture Frame : 543 Frame
- Drop Frame : 0 Frame
- Frame Rate : 15.01 FPS
- - Performance Info -
- File Size : 7 MB (0.2MB/Sec)
- BitBlt Time : Mean 38mSec Max 78mSec
- Encode Time : Mean 4mSec Max 11mSec
- ■江端所感
- ■根拠はないのですが、「一回AGM形式を試してみる」「音も制御も落す」とした後、「MP4の場合は、レートを落してみる」としてみるのが大切なような気がしました。
- ■あと、本ソフトの「プレビュー画面」は偉大です。これは、素晴しくhelpfulです。レビューしてみるまで画像が分かるのは非常に便利です。
- ■サポート頂きありがとうございました。
- 5.作者様から江端に頂いたメールの概要(その2)
- ■今回の問題の仮説の修正
- ■とりあえず、問題が解決されたとのことで、当方としても一安心です。
- ■今回の問題は、「過負荷のエンコードを強制された結果、最初の4秒分しか正しくファイル出力できなかった」と問題の仮説を修正しました
- →上記3.の「録画開始から4秒後に自動的に録画が終了してしまう問題」の仮説から修正
- ■Windows7の場合
■デフォルトではAeroがOnになっていますので、キャプチャー可能なフレームレートは最大15FPS程度にしかなりません。
■この様な状態で高フレームレートでの録画を試みますと、処理負荷が高くなり、特にH.264でのエンコードには悪影響を及ぼす可能性があるのかもしれません。
■Windows7での高フレームレートでの録画用には「Aero停止」機能を提供しています。
■Aeroを停止すると、半透明のAeroグラス表示が行われなくなりますので、ソフト動作のデモ用にキャプチャーする場合等には相応しくは無くなりますが、キャプチャー可能なフレームレートは60FPS程度まで向上します。
- ■高フレームレートでのリアルタイムエンコードの問題点
■ただし、問題の本質が、H.264エンコーダーが高フレームレートでのリアルタイムエンコードに耐えられない、ということであった場合には、Aeroを停止してキャプチャーレートを上げると、更に酷い状況になる可能性も考えられます。
- ■本ソフトウェアの強み(AGM形式用のエンコーダー)
■その様な場合にも、AGM形式用のエンコーダーは、当方が開発しており、通常は、60FPSのリアルタイム録画でも、CPU性能に応じたエンコードを行う様にしています。
■リアルタイムのH.264エンコードが上手く行かない場合には、録画はAGM形式で行い、AGM形式の録画ファイルが出来上がった後、AGMPlayer/AG-ムービーカッターで、それをmp4(H.264)形式に再エンコードする、という手もあります。
■この場合には、H.264エンコーダーでも、時間をかけて無理のないエンコードが行われますので、リアルタイム録画では問題が発生する場合にも、問題が発生しなくなる可能性は高くなります。時間がある時にでもお試し下さい。
- ■今回の問題の仮説の修正
- 以上